






.png?VGVscG8tQzItUG9pbnQgb2YgU2FsZSBUZXJtaW5hbCA=*2023/07/Telpo-C2-good-look-550.png?VGVscG8tQzItUG9pbnQgb2YgU2FsZSBUZXJtaW5hbCA=*2023/07/Telpo-C2-80-printer-550.png?VGVscG8tQzItUG9pbnQgb2YgU2FsZSBUZXJtaW5hbCA=*2023/09/C2-printer-250.jpg?VGVscG8tQzItUG9pbnQgb2YgU2FsZSBUZXJtaW5hbCA=)
























The global robot market size was $25 billionin 2020, which is expected to reach 260 billion dollars by 2030, nearly tentimes in ten years, relative data showed. Undoubtedly, the robot industry isone of the most dazzling ones in the world.

As demand drives development, if we hope toenter into the robot industry in line with times, we should learn relative informationabout the robot. When it comes to the most important part of the waiter robot, the chassis should make its mark, with its high precision movement and navigationtechnology.
The excellent robot chassis can achieve high precision navigation, automatic obstacle avoidance, autonomously find theoptimal route. And the commercial robot chassis is mainly composed of a laserradar sensor, depth camera, ultrasonic and fall sensor, and other corehardware.
In terms of chassis fusion technology, thereare two types of chassis in the market. One is the laser radar chassis combined with laser SLAM autonomous localization technology, and another is the chassisequipped with visual SLAM modular localization and navigation system.

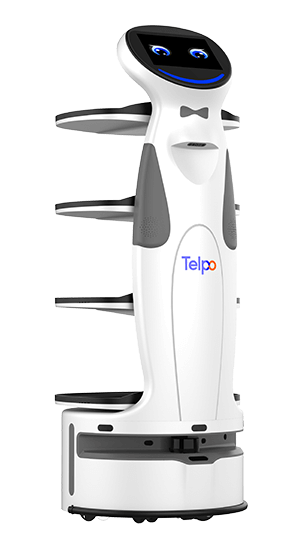
Telpo R55 support laser SLAM
What'sthe difference between laser radar chassis and visual chassis technologies?
First, laser SLAM started earlier than visual SLAM, and its theory, technology, and products are relatively mature.
Second, laser SLAM has a higher cost thanvisual SLAM, as the latter mainly collects data through cameras and it will notcost a lot.
Third, laser SLAM has a more precise map construction ability. The precision of laser SLAM is about 2cm, while that of the visual SLAM is about 3cm. To adapt to more use scenes, Telpo robot waiter R55 integrates laser, visual and ultrasonic triple positioning, with the leading navigation algorithm, it can more flexibly plan the walking route.
When obstacles or humans appear above theradar scanning area, the integrated navigation technology will be activated andfully perceive the surrounding environment through the 3D camera, ultrasonicand radar sensor, to avoid obstacles and re-plan the walking route. Inaddition, the ultrasonic sensors will be used to accurately detect obstacles includeglass, mirrors, and other high-permeability materials, empowering the robot waiter able to avoid them in time before crushing.
Fourth, laser SLAM is mainly used indoor,while visual SLAM can work in both indoor and outdoor environments.
There is no doubt that the differencesbetween laser SLAM and visual SLAM are not limited to the above aspects. Ingeneral, laser SLAM is a relatively mature positioning and navigation scheme atpresent, but it is not convenient to install due to its large size. However,using multi-sensor fusion technology, the fusion of laser SLAM and visual SLAMwill play a more valuable role.
Tag: robot waiter, laser SLAM, visual SLAM

